Meet the Muscle-Powered Robot with Pep in its Step
Researchers have unveiled an efficient two-legged biohybrid robot with real muscles, designed to mimic human gait and achieve fluid movements in water, seamlessly blending biology and mechanics in a notable stride in the evolution of biohybrid robotics

AI Image Generated Using DALL-E
Human bodies are flexible, precise, and efficient, qualities which are often lacking in their robotic counterparts. In pursuit of these elusive qualities, Japanese researchers drew inspiration from the intricacies of human gait to fashion a two-legged biohybrid robot. Published in the journal Matter, this innovative method seamlessly integrates muscle tissues with artificial materials, endowing the robot with the ability to walk and pivot.
Shoji Takeuchi, the corresponding author from the University of Tokyo, Japan, underscores the burgeoning interest in biohybrid robots—a convergence of biology and mechanics—as a nascent field of robotics with biological functionalities. “Using muscle as actuators allows us to build a compact robot and achieve efficient, silent movements with a soft touch,” notes Takeuchi.
The robot's bipedal design builds upon the lineage of muscle-possessing biohybrid robots, which had previously demonstrated capabilities in crawling, swimming forward, and making turns—albeit not sharp ones. The capacity to turn sharply is a pivotal feature for robots navigating obstacles.
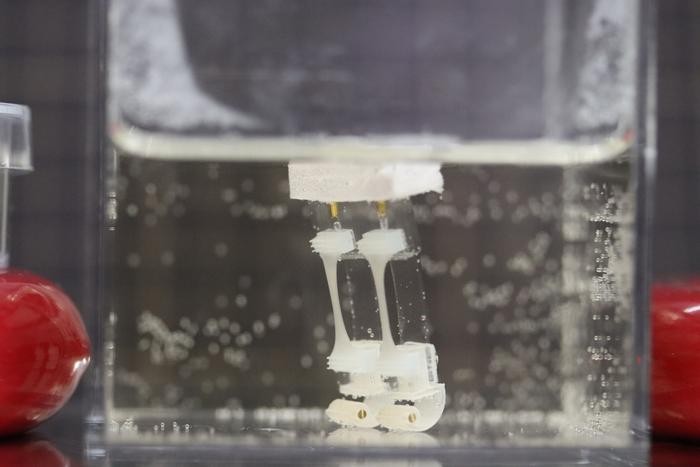
To construct a more agile robot with nuanced movements, the researchers fashioned a biohybrid model emulating human gait, specifically engineered for operation in water. Equipped with a foam buoy top and weighted legs for stability underwater, the robot's skeleton primarily comprises flexible silicone rubber that can flex in accordance with muscle movements. Lab-grown skeletal muscle tissues were affixed to the silicone rubber on each leg.
The application of electricity to the muscle tissue triggers a contraction, lifting the leg, and the subsequent dissipation of the electricity causes the heel to land forward. Alternating electric stimulation between the left and right leg every 5 seconds facilitated the biohybrid robot's successful "walking" at a speed of 5.4 mm/min (0.002 mph). For turns, researchers repeatedly stimulated the right leg while the left leg anchored, enabling the robot to execute a 90-degree left turn in 62 seconds. “Initially, we weren't at all sure that achieving bipedal walking was possible, so it was truly surprising when we succeeded,” said Takeuchi. “Our biohybrid robot managed to perform forward and turning movements with a bipedal walk by effectively balancing four key forces: the muscle contractile force, the restorative force of the flexible body, the gravity acting on the weight, and the buoyancy of the float.”
The research team envisions enhancing the bipedal robot with joints and thicker muscle tissues for more sophisticated and powerful movements. However, before introducing additional biological components, Takeuchi emphasizes the need to integrate a nutrient supply system to sustain living tissues and devise structures facilitating the robot's operation in the air.
"A cheer broke out during our regular lab meeting when we saw the robot successfully walk on the video," Takeuchi recalled. "Though they might seem like small steps, they are, in fact, giant leaps forward for the biohybrid robots."









