Bio Design
Engineered Muscles That Move Like the Real Thing? MIT Just Made It Happen
Researchers have developed a way to 3D-print muscle tissue that contracts in multiple directions, opening new possibilities for soft robotics and medical applications

[DALL-E]
The human body moves with an intricate ballet of muscle fibers pulling and twitching in carefully coordinated patterns. Some run in straight lines, others spiral or fan out, working together to generate a full range of motion. Nature, as always, has spent millions of years perfecting the design. Scientists, however, have been playing catch-up.
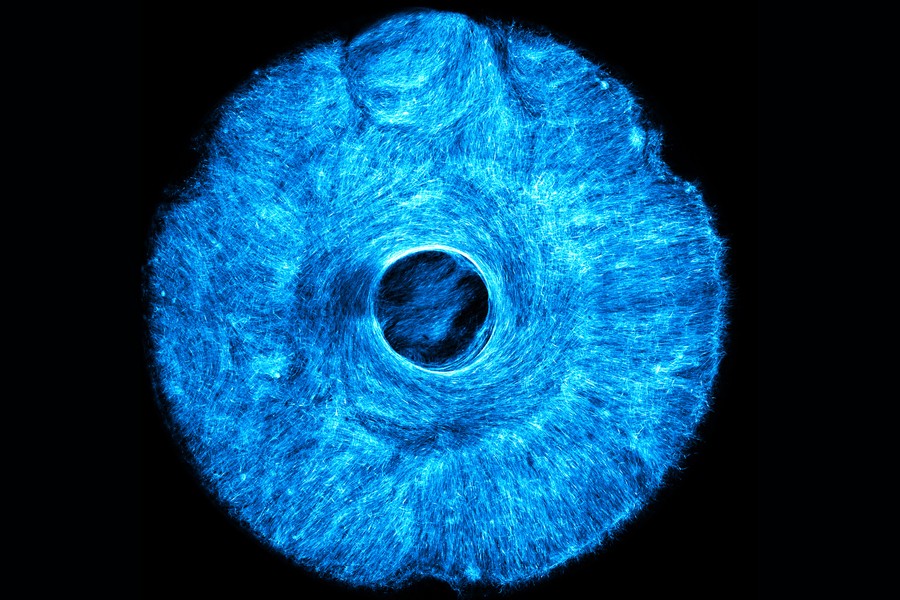
For years, researchers have been experimenting with “biohybrid” robots—machines powered by living muscle tissue. The problem? These engineered muscles have mostly been one-trick ponies, contracting in a single direction and severely limiting what these bio-bots can actually do. But now, a team at MIT has cracked open a new approach: stamping muscle cells into precise, complex patterns that allow for coordinated contractions in multiple directions. The result? An artificial muscle-powered structure that mimics the human iris, expanding and contracting like the real thing. The researchers published their open-access results recently in Biomaterials Science.
The Stamp That Prints Muscle
The innovation, described in Biomaterials Science, hinges on a deceptively simple concept: a stamp. Yes, a stamp. But not the kind you slap on an envelope. This one is covered in microscopic grooves, each as tiny as a single cell. The MIT team 3D-printed these grooves onto the stamp’s surface and then pressed it into a soft hydrogel, creating an imprint. Muscle cells seeded onto this patterned hydrogel aligned themselves along the grooves, growing into structured, functional fibers. When stimulated, the engineered muscle contracted in multiple directions—just like the real thing.
This stamping method, pioneered by Ritu Raman, the Eugene Bell Career Development Professor of Tissue Engineering at MIT, could unlock an entirely new way of fabricating artificial muscle. “With the iris design, we believe we have demonstrated the first skeletal muscle-powered robot that generates force in more than one direction,” Raman says. “That was uniquely enabled by this stamp approach.”
Crucially, the technique isn’t restricted to muscles alone. The same method could be applied to neurons, heart cells, or other tissues that rely on structured cell alignment to function. Raman envisions a future where engineered tissues more closely resemble their natural counterparts, rather than the simplistic, single-function fibers currently produced in the lab.
Training Muscle for the Future
Raman’s lab is no stranger to training muscle cells. In previous work, her team developed hydrogel mats that encourage muscle cells to fuse into strong, aligned fibers without peeling away—a necessary step for making functional artificial muscles. They even designed a way to “exercise” these cells by engineering them to contract in response to pulses of light, essentially giving them a workout.
But one challenge remained: real muscles don’t all pull in one direction. Even in something as simple as the iris, muscle fibers are arranged in concentric and radial patterns, dynamically adjusting the pupil’s size. The stamping technique bridges this gap, providing a blueprint for muscle cells to follow as they grow.
“The idea is simple,” Raman says. “But how do you make a stamp with features as small as a single cell? And how do you stamp something that’s super soft? This gel is much softer than Jell-O, and it’s really hard to cast because it could tear so easily.”
After refining the approach, the team created a stamp that could reliably imprint complex patterns onto hydrogel without damaging it. They then seeded the hydrogel with genetically engineered muscle cells that respond to light. Within a day, the cells aligned along the grooves, fusing into fibers that mimicked the natural architecture of an iris. When stimulated, the muscle contracted in multiple directions—proof that the technique works.
Beyond the Petri Dish
While this particular experiment focused on skeletal muscle cells—chosen for their responsiveness—the technique could be adapted for other cell types. Raman’s team is already exploring how to apply the approach to different tissues and how to integrate it into real-world applications. The potential is vast: from muscle-powered soft robots that can navigate tight spaces to bioengineered tissues that could one day restore function in people with neuromuscular injuries.
The long-term vision? Replace traditional rigid actuators in robotics with soft, bioengineered alternatives that are more energy-efficient, biodegradable, and capable of movements that feel more, well, human.
“Instead of using rigid actuators that are typical in underwater robots, if we can use soft biological robots, we can navigate and be much more energy-efficient, while also being completely biodegradable and sustainable,” Raman says.
And with a technology this promising, it’s easy to imagine a future where artificial muscles aren’t just an academic curiosity—but a fundamental part of how we build robots, repair bodies, and reimagine the boundaries between biology and engineering.